
オンライン英会話10000分の結果
こっそり英会話を続けていたのですが、それが先日10000分を突破しました。 一日1時間をほぼ毎日続けて、約半年くらいで10000分を超えました。 気になる成果はと言うと、 「少ししゃべれるようになった・・・気のせいかもしれないけど」、くらい […]
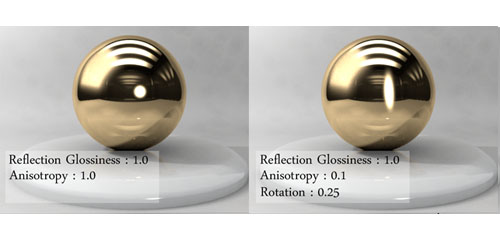
その1へ その2へ その3へ その4へ その5へ 補足へみあまてりある。3回目ッス。Anisotropyのパラメータから。始める前は、もっとサクサク進むと思ってたのに、なかなか進みませんなぁ( ̄。 ̄)Mayaは2012の英語版を使用しています。最新のバージョンとは異なる可能性がありますのであしからず。 Anisotropy(異方性)Anisotropy(異方性)1だと等方性。それ以外の値で異方性。ReflectionのGlossinessの影響を受ける。1以上の値にする場合は、ReflectionのGlossinessの値を下げる必[...]
続きを読む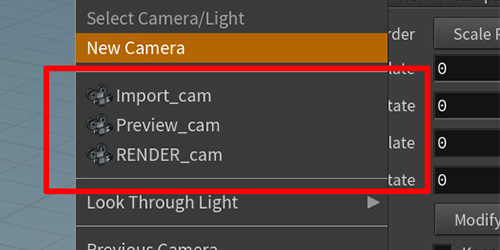
Houdiniメモ。ビューポート右上のここの所にカメラ名を表示させない方法。表示させたくないカメラに、viewmenuというアトリビュートを作成し、値を0にセット。これで、シーン内にカメラがあってもビューポートのカメラのリストには表示されなくなる。シーン内にカメラがいっぱいあって管理が大変なとき、これで少しだけカメラの管理が楽になる。実はマニュアルに書いてあった。https://www.sidefx.com/docs/houdini16.5/basics/view.html[...]
続きを読む
今回はMayaとAfterEffectsのトリビア的小技、三本立てです。(内容の薄さを数でカバーしようと、そういう感じです。勘弁) Mayaでシーケンスファイルを読み込む時Mayaでシーケンスファイルを読み込みたい時、(※シーケンスの桁数が5以上の時)ファイル名に注意が必要です。どんな風に注意するかというと、↓こんな風にNG:FileName_XXXXX.exeOK:FineName.XXXXX.exe注意点は、ファイル名とシーケンス番号の区切りを”.”(ドット)にすることです。AfterEffectsなどはシーケンス番号の前は”_”[...]
続きを読む
Houdini回ですぜ、旦那。今回は「Volume Slice」と「Volume Trail」を使って、Velocity(速度)フィールドを可視化する方法。※流体エフェクトの作り方ではありません。(ところで流体の動きって見てて飽きないよね)FLIPのキャッシュから、Velocityを確認したい時とかに使う・・・かな?確認用ってことで。ネットワークは下の感じ。以上!また来週!使用バージョン:Houdini13[...]
続きを読む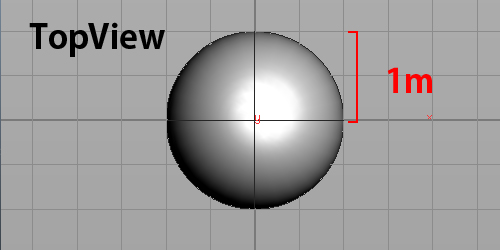
Houdini勉強中につき私的メモからの抜粋システム単位とグリッドについてのメモ。システム単位についてマニュアル曰く、「Houdiniダイナミックスはキログラム、メートル、秒の単位を使う」とのこと。システム単位を確認&変更する場合は、Unit Lenght(m)=1Unit Mass(kg) =1Houdini先生が、"長さ1"って言ったらそれは1メートルのことで、"重さ1"って言ったら1kgのこと。例えばデフォルトでSphereを作成すると、radius=1の球ができる、これは半径1mの球。boxを作成すると、siz[...]
続きを読む
今回は、簡単な破壊エフェクトについて手順も踏まえて書いてみようと思います。最終的にこういうのを作ります。出来るヒトは見なくてよろしwここでは事前にジオメトリを破片に分割して、それをシミュレーションするという手順で進めたいと思います。ざっくり書くと、1:ボロノイ分割での破片の作成2:RBD Fractureでシミュレーションです。 1:破片の作成まず、破壊したいオブジェクトを細かい破片に分割します。ここではboxを破片に分割しています。(Houdiniに限らず)破片の分割には、ボロノイという分割方法を使うのが一般[...]
続きを読む
今回はMayaとAfterEffects回。Mayaから出力したNullとCameraをAfterEffectsで読み込む手順の備忘録です。以下手順。①:locatorの名前を"null"にしておく。("locator"だと何故かAE側で読み込まれないため)②:CameraとNullのキーフレームをベイクしておく。方法は2種。A・・・メニューから Edit -> Key -> Bake SimulationB・・・Graph Editorから -> Curves -> Bake Channel※違いは全チャンネルベイクか、選んだチ[...]
続きを読む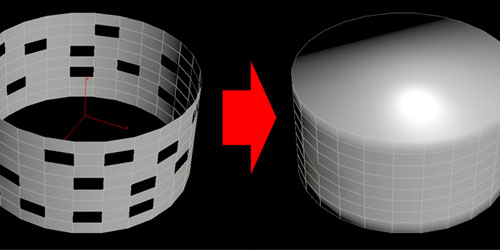
PolyCapノードでフタをするpolycapノードで穴を塞ぐ時、Groupのところを*(アスタリスク)にしておくと穴が開いてるところをオートで塞いでくれるっぽい。ポイントだけ残す その1addノードを使うと、ポイントだけ残して他削除することができます。Pointのタブに"Delete Geometry But Keep the Points"ってのがあるのでそれ。ポイントだけ抽出する時は、ほぼaddノードを使っている気がします。ポイントだけ残す その2Deleteノードでもpoint1だけ[...]
続きを読む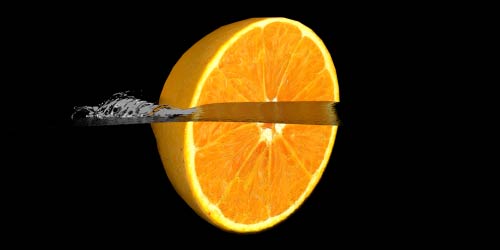
Houdiniで水の表現を模索中wポイント数はおよそ63,000,000。↓画像のように画面のほとんどを水で埋め尽くしました。というのも、FLIP SolverのFeedbackという機能を使いたかったからです。このFeedbackってのを使うと、RBD Object(ここではオレンジ)に水の浮力(密度の差?)の影響を与えることができるそうです。今回は水中でのオレンジの落下減速を再現したくて使ってみました。(最終的にアップした映像にはスローモーションの演出を加えてしまったため、あまり効果を感じられませんでしたがw)Feedback Scaleの値[...]
続きを読む
AfterEffects(以下AE)を複数起動する方法について。cmdで起動時にオプション "-m" で複数起動できます。下は参考例です。"C:\Program Files (x86)\Adobe\Adobe After Effects CS3\Support Files\AfterFX.exe" -mデスクトップ等のショートカットアイコンのリンク先に -m を追加すれば、cmdから実行しなくても済みます。AEのオプションはこれしか知らないのですが、他にもあるのでしょうか。[...]
続きを読む
こっそり英会話を続けていたのですが、それが先日10000分を突破しました。 一日1時間をほぼ毎日続けて、約半年くらいで10000分を超えました。 気になる成果はと言うと、 「少ししゃべれるようになった・・・気のせいかもしれないけど」、くらい […]
