Houdini:MatchSizeとTransform by Attribute(SOP)
Houdini勉強回。 前回、MatchSize(SOP)について取り上げましたが、そこで紹介しなかった機能があります。それが、Restore/Stash Transformのパラメータです。 これらを使うことで、MatchSize(ROP […]
Houdini回です。今回はカーブの接線(tangent)を取得方法を幾つか。調べて忘れて調べてを繰り返すので、備忘録も兼ねて。polyFrame(SOP)で接線を取得polyFrame(SOP)を使うと、「Normal(法線)」「Tangent(接線)」「Bitangent(従法線)」を取得することができます。下の青線がNormal(法線)、黄色線がTangent(接線)、赤いのがBitangent(従法線)。接線だけが欲しい場合はTangentだけ有効にしとけばOKStyleの設定で、平滑化[...]
続きを読む
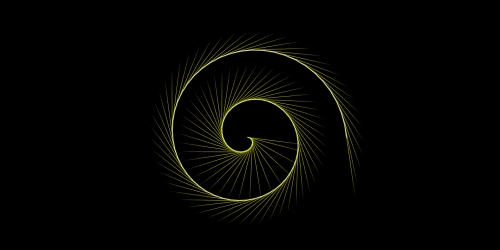
AfterEffectsで作るこゆヤツ。作成過程をStep by Stepで!Step1:花の形状のマスクを用意するIllustoratorで作ったパスを持ってくるなり、AEで下絵をトレスするなりでアニメーションさせたい形状のマスクを用意します。Illustorator->AEは、コピー&ペーストでVectorパスがマスクとしてコピーできます。1レイヤにつき1つのパーツがよいと思いますです。レイヤー数は沢山になります。(サンプルのはだいたい50レイヤーくらいありいます)地味な作業ですがガンバリます。[...]
続きを読む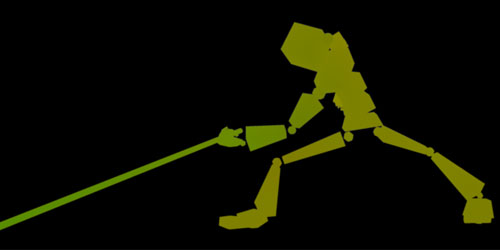
今回は備忘録もかねて、MayaでのMotionVector素材の出力と使い方についてです。MotionVector素材とはコンポジット側でモーションブラーをかける際に必要な素材です。備忘録も兼ねているので説明は少なめに駆け足手やってきたいと思います。1:Passを追加Max:Pixel Dispの値を確認、あとで使う。2:RenderSettings の Qualityタブで MotionBlurを有効にする。Motion Blur : FullShutter Open : 1.0Shutter Close : 1.0Custom Motion Of[...]
続きを読む
『突然、Mayaの野郎がエラーメッセージをはいて強制終了しやがった』『この作業が終わったら保存しようと思っていたのに・・・』わりとよくある事だったりします。そんな時、もしかしたらファイルを復旧できるかもしれない方法っす!この場所を探してみてください。(Windowsです。MacとかLinuxとかはしらんッス!)C:\Users\****\AppData\Local\Temp(***はユーザー名)エラーが出て強制終了した場合は、この場所にバックアップが保存されている場合があります。バックアップファイルが壊れている場合もあるの[...]
続きを読む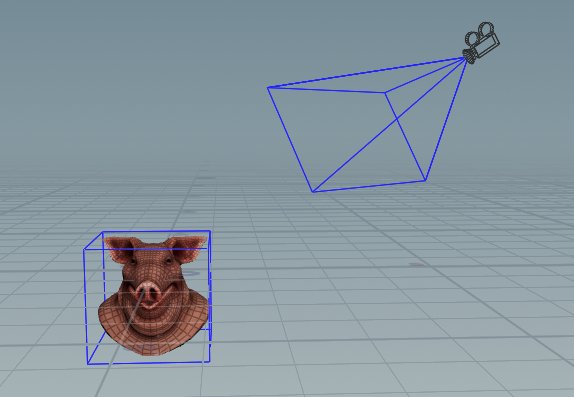
Houdini勉強回。今回のテーマはAssetとガイドです。ここでの"ガイド"とは、下図のようにシーンビュー上に表示される青いワイヤーフレームを指しています。Asset作成時にこのガイドの設定ができるそうな。ガイドに設定されたジオメトリは、図のような青いワイヤーフレーム表示になるそうな。これまでガイド用にわざわざラインに変換したりしてたんだけど、Assetのガイド設定で事足りるじゃん!てなことで、以下設定方法。設定方法AssetのType PropertiesでNodeタブにある"Guide Geometry"に、ガイド表示に使用したいジオメ[...]
続きを読む
Houdiniノード勉強回。Edge Cusp(SOP)について。マニュアル曰く、"Sharpens edges by uniquing their points and recomputing point normals."訳すと、このノードは「ポイントをユニークなものにすることでエッジをシャープにし、ポイントの法線を再計算する」。たとえば、デフォルトのポリゴンの球に繋ぐとこうなる。エッジをシャープにする機能だけだと、あまり使いドコロが無さそうなのだが、Edge Cusp(SOP)にはもうひとつ、エッジを分離する機能がある。こんな感じ。上の[...]
続きを読む
Houdini回。前回に引き続き、Fog Rayを作る方法、別解!普通にVolume使ってもFog Ray作れるのでは、と思ってやってみた。アルファめちゃ薄いけど、っぽいものは出来たかなと。以下、手順をStep by Stepで。1:スポットライトを作成する。Fog Rayの光源ですね。基本、この光に照らされた範囲がFog Rayになります。2:Volume(SOP)でFogを作成するFogRayを作りたい領域にFogを作成する。ここでは、安直にVolume(SOP)を使った。普通にBox型でも良いですが、ライ[...]
続きを読む
Houdiniの小技集、その3です。いろいろです。選択範囲の拡張Shift +gハンドルのサイズを変更する*・・・大きく/・・・小さくサブディビジョン表示(選択)-・・・OFF+・・・ONハンドルの種類を変更Y、もしくはShift+Y。メンバーの再選択`キー・・・(グループ)選択メンバーの再選択。セレクトアイコンから右クリックメニューからでも出来る。日本語キーボードだと上手く機能しないなぁ、英語キーボードだと大丈夫なのに。と、思ってたらインディゾーンさんの[...]
続きを読む
Houdini勉強回。Houdiniについてくるサンプルファイルが、とても勉強になったので復習がてら解説してみようとてするなり。使用するサンプルファイルは、VellumSmokeSheetです。サンプルファイルの開き方はこちらの記事参考。https://www.sidefx.com/docs/houdini/examples/nodes/dop/vellumsolver/VellumSmokeSheet.htmlこんな感じに、布の下に入り込んだ空気が押し出されてブワッとなる、みたいなシミュレーションです。上図赤枠部分が、SIM前の仕込み。上図緑枠部分が、[...]
続きを読む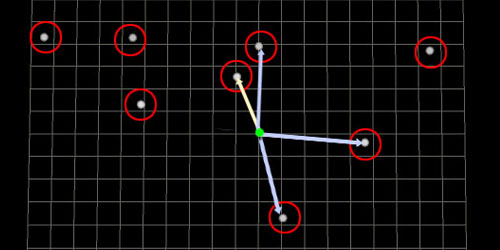
Houdini回。VEXです。今回は、評価ポイントからN番目に近いポイントを取得する方法です。評価ポイントから2番目に近いポイントや、5番目に近いポイントを取得するってことです。以前、Noiseについて調べた時の副産物だったりします。N番目の前に、もっとも近いポイントの探し方から。これはnearpoint(VEX)を使うことでわかる。もっとも近いポイントの番号を教えてくれます。下のは、それを使ってWorleyノイズを作ってるとこ。ではN番目に近いポイントを取得するにはどうすればよいのか。PointCloudOpen(VEX)とPoint Cl[...]
続きを読む
Houdini勉強回。 前回、MatchSize(SOP)について取り上げましたが、そこで紹介しなかった機能があります。それが、Restore/Stash Transformのパラメータです。 これらを使うことで、MatchSize(ROP […]
Houdiniノード勉強回。 Match Size(SOP)ノードを使うと、容易にオブジェクトを原点に配置できることを、最近知りました。 使い方は簡単、Match Size(SOP)にジオメトリを繋ぐだけ。 ”原点に配置”したいって時、けっ […]
