Maya:車輪でリグ考察(了)
車輪リグ考察。 前回、フレーム単位で移動距離から回転角を求める方法を試しました。 大旨よさげだったのですが、しかし、どうもうまくいかない場合がありました。 車輪がスライドした場合です。 進行方向ではない向きの移動も回転計算に含んでいるのが原 […]

こんなの作ってみましたYoutubeの動画説明欄にリンクを貼っていますが、これをBlenderで作っている人がいて、「なにおぅ、Houdiniだってこのくらい!」というノリで作ったものです。水は、皿の影になるところにエミッタを置いて、そこから発生。また一番上からだけ流すと、一番下の皿に溜まるまでシミュレーション時間がかかってしまうので、皿ごとにエミッタを置いて水が溜まるまでの時間を節約しています。別アングルから見たプレビューだと、その様子が分かります。また厚みの薄い水のシミュレーションは、メッシュ時に穴がぽこぽこ開くのですが、今回はある程度水かさが増えたとこ[...]
続きを読む
VEX sentence of Wrangle.Global Varialbles that frequently used//SOP@Cd //Point Color@P //Point Position@v //Point Velocity@ptnum //Processing Point Number@pscale //Particle Scale@numpt //Total Point Number@N //Normal//Time@Frame; //Frame@T[...]
続きを読む
Vimeo行くと大きいのが見れます。MayaのView上ではこんな感じ。機械兵の欠けや、木の凸凹は大部分がディスプレイスメントマップ。ツタは、『Ivy Generator』というソフトを使って。コケっぽいのが欲しかったので、Furで木と地面を覆いました。数種類混ぜようかとも思ったのですが、今回は一種類のみにしました。Furは普通にレンダリングすると時間がかかったので、RenderSettings のPrimary Renderを "Rasterizer(Rapid Motion)"に変更してレンダリングしてます。出力Pas[...]
続きを読む
Houdiniノード勉強回。Labs UV Transfer(SOP)UVの転送。以前これについての記事を書いたが、それのすごい版!トポロジが異るジオメトリに対して、いい感じにUVを転送してくれる。ひとまずVDBを介して低解像度ポリゴンを生成して、UVを転送してみるとその制度が分かる。中身をざっと確認してみると、手法的には以前書いた記事の中の、XYZ Distanceを使う手法と基本は同じで、UVのアイランド毎にUV転送を行っています。あとプラスアルファとしてUVの境界部の処理が付いている感じでしょうか。いつのまにこんな便利ノードが、と思うくらい[...]
続きを読む
RecursiveGrowthです。思いのほか楽しくて形状違いで4つも作ってしまいました。ソリッドな見た目ですがほぼVDBで制御してます。ほんとHoudiniのVolumeは汎用性が高くて最強だと思う。ただシミュレーション制御ってのもあり、狙った形に持ってくのは至難の業。以下、作業画面。面白かった。以上!また次回ね![...]
続きを読む
Toxikのノード解説です。今回はColor SourceColor SourceノードはAfterEffectsの平面のようなものでしょうか。このColor Sourceノード、歯車のアイコンがついてます。imageを生成するノードには、この歯車アイコンがついてるみたいです。いろいろパラメータがありますが、ひとまず↓の赤枠の部分。WidthとHeightが平面の幅と高さになります。Colorは平面の色、Fillが背景の色になります。そのまま"Set Fill Color"もやります。Set Fill Color[...]
続きを読む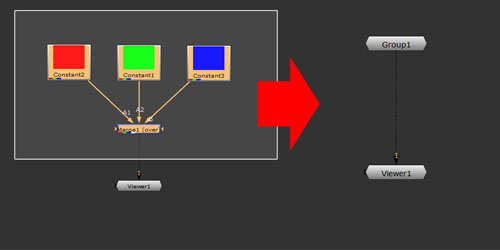
奥さん、Nukeノード回でっせっ!今回は「Group」ノードを取り上げてみました。名前のとおりグループにまとめるノードですね。使い方は、①:グループに含めたいノードを全部選択して②:Ctril + G一旦、グループ化した後、中身を見たい場合はGroupノードのPropertiesにある”S”ボタンを押すことで中に入れます。ちょいと分かりづらいですけど、右上の小さいやつです。また、一旦作成したグループを元に戻すには、①:Groupノードを選択して②:Ctrl+Alt+G以上、備忘録も兼ねてNukeのGroupノードについ[...]
続きを読む
Houdini回。Wrangle(SOP)のVEX例文。メモより抜粋、その2。その1はこちら!入力を取得@OpInput1 //1番目の入力@OpInput2 //2番目の入力@OpInput3 //3番目の入力@OpInput4 //4番目の入力アトリビュートを取得とか#1番目の入力のdensityを取得density = findattribval( @OpInput1, "primitive", "name", "density");[...]
続きを読む
Houdini回。地味な奴です。Edit Parameter interfaceの"Disable When"と"Hide When"のところの条件文の書き方。毎回、忘れるので。マニュアル曰く、”コンディショナルルール”と言うそうです。構文は以下のとおり。大括弧{ }で条件文を囲うらしい。条件がTureになれば、そのパラメータが無効、または非表示になる。大括弧{ }の中に複数条件を書くと&(and)の意味、大括弧{ }を複数書くと|(or)の意味になる。上記の条件だと、「toggleパラメータが1、且つvalueパラメ[...]
続きを読む
車輪リグ考察。 前回、フレーム単位で移動距離から回転角を求める方法を試しました。 大旨よさげだったのですが、しかし、どうもうまくいかない場合がありました。 車輪がスライドした場合です。 進行方向ではない向きの移動も回転計算に含んでいるのが原 […]
※ 注意 ※ この記事のリグは失敗例です。 記事のとおり作ると、記事の通り失敗します。 それでもよいという天の邪鬼な方に向けておくる、”Mayaで作る車輪リグ考察(失敗編3) そろそろ成功例だけ載せてくれ、とお叱りを頂きそうな今 […]
※ 注意 ※ この記事のリグは失敗例です。 記事のとおり作ると、記事の通り失敗します。 それでもよいという天の邪鬼な方に向けておくる、”Mayaで作る車輪リグ考察(失敗編2) まずは前回の失敗から。 一方向の移動にしか、車輪の回 […]
※ 注意 ※ この記事のリグは失敗例です。 記事のとおり作ると、記事の通り失敗します。 それでもよいという天の邪鬼な方に向けておくる、”Mayaで作る車輪リグ考察(失敗編) 最終目標はこういうヤツ↓ 簡単そうに見えて、意外と奥が […]
